Enhancing Robot Response Times with Hardware Accelerators
Written on
Chapter 1: Introduction to Hardware Accelerators
Recent advancements in robotics at MIT indicate that utilizing dedicated hardware accelerators could potentially resolve long-standing delays in robot responsiveness. The research team proposes a method for programming robot responsiveness that would allow the creation of specific templates to be applied across various robotic models. Their vision encompasses a synergistic approach combining hardware and software to enhance motion planning capabilities.
“A notable performance gap exists in motion planning and control: while robot joint actuators can react at kHz rates,” the team explains, “current online techniques for complex robots—like manipulators, quadrupeds, and humanoids—are constrained to hundreds of Hz due to the limitations of existing software.”
Section 1.1: Performance Gaps in Robotics
Despite efforts to optimize existing robot models and their programming, the performance gap remains unbridged. The researchers note that certain compute-heavy tasks, such as calculating the gradient of rigid body dynamics, consume between 30 to 90 percent of the processing power in emerging nonlinear Model Predictive Control (MPC) systems.
The field of motion planning has received less attention compared to collision detection, perception, and localization—essential for a robot to function efficiently in three-dimensional spaces. A robot must first understand its surroundings, create a map, localize itself within that map, and then devise a route to achieve its objectives. It's important to note that collision detection is a vital component of motion planning.
Subsection 1.1.1: The Goals of the Research
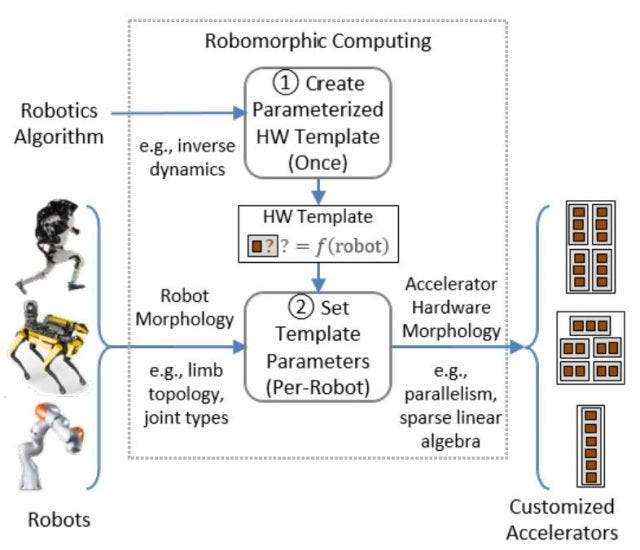
The overarching aim of this research is not only to enhance motion planning techniques but also to establish a framework for both hardware and software that can be adapted for various robot types, thereby accelerating development and deployment. The paper posits two main assertions: first, that software optimization techniques tailored for individual robots can be integrated into hardware via specialized accelerators; and second, these techniques can inform a design methodology for constructing such accelerators. This leads to the formation of a new domain they refer to as “robomorphic computing.”

Section 1.2: Methodology of Motion Planning
The team's approach involves creating a template that applies an existing control algorithm once, facilitating the exploitation of both parallelism and matrix sparsity. The parameters of this template are programmed with values that reflect the capabilities of the robot. Zero-values in the matrices indicate motions that the robot cannot perform. For instance, a humanoid robot would have non-zero values in the areas that dictate the movements of its limbs.
Chapter 2: Implementation and Results
The researchers have found that deploying their proposed structure on an FPGA, as opposed to traditional CPUs or GPUs, can lead to latency reductions ranging from 8x to 86x, along with a 1.9x to 2.9x improvement in response rates when the FPGA operates as a co-processor. Enhancing robot reaction times could enable these machines to perform effectively in urgent scenarios where rapid responses are crucial.
The first video, titled "AI hardware acceleration | getting the compass," explores the role of hardware in boosting AI performance.
The second video, "2023 AP Physics 1 Free Response #2," discusses the principles relevant to robotics and motion planning.
A characteristic of robots and androids in science fiction is their ability to react faster than humans. Currently, the speeds exhibited by fictional androids, like Data, are unattainable. One of the reasons for this limitation is our inability to maximize the performance of our actuators. By enhancing the speed at which machines can process information, we can subsequently improve their movement capabilities.
Now Read: Boston Dynamics Says Goodbye to 2020 With a Robot Dance Party. Hyundai Is Buying Boston Dynamics for Almost $1 Billion. MIT’s Autonomous ‘Roboats’ Learn to Shapeshift.